QB SOFTHAND RESEARCH
QB SOFTHAND RESEARCH
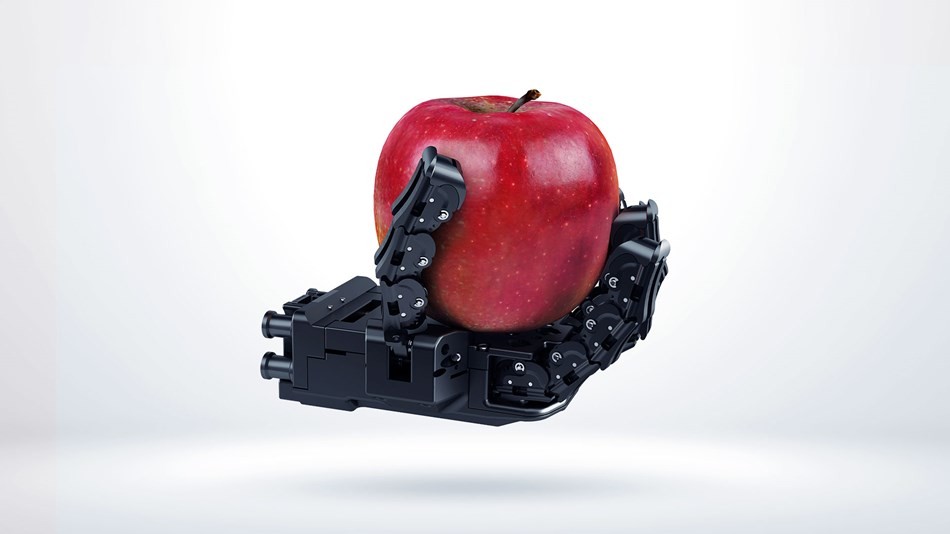
qb Soft Hand Research是一种基于软机器人技术的拟人机器人手,它灵活、适应性强、能够与周围环境、物体和人类互动,同时降低了伤害操作员、破坏待处理产品和损坏机器人的风险。
qb SoftHand Research具有灵活的适应性,可以在不改变控制动作的情况下抓取不同的物体,展现出无与伦比的简洁性和灵活性。
由于其柔软的性质,我们在设计qbrobotics夹爪时,将简约与内部智能进行了有机结合,不仅可确保意外人机交互的安全性,而且还适于在不改变控制动作的情况下抓取不同的物体。
借助这些创新,夹爪极其灵活,可以抓取各种各样的物体。单电机驱动使夹爪能做到即插即用,同时也易于控制(单个电机需要一个控制信号来关闭和打开整只手),并且价格合理
适用于以下应用
- 拾取与放置
- 机器维保
- 组装
- 实验室分析及测试
安装
开发
功能
-
描述
特性与优势
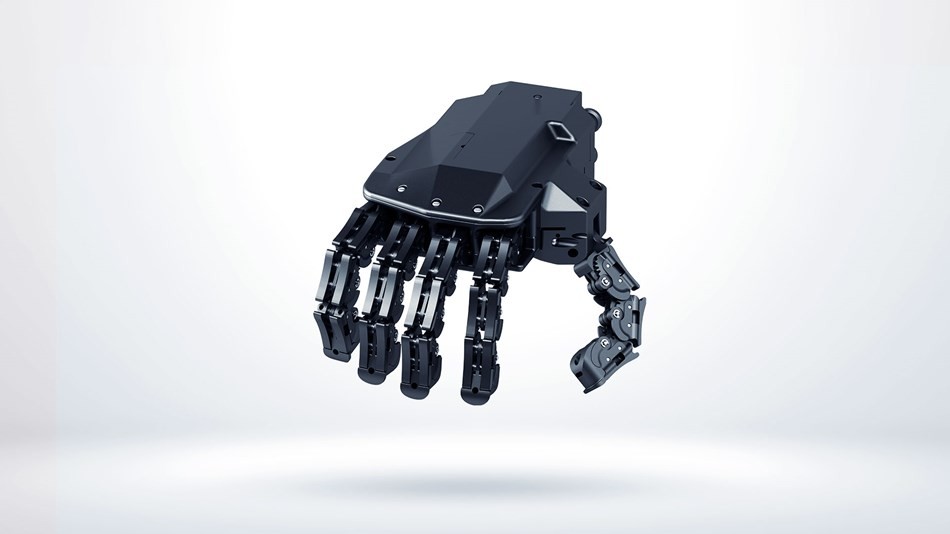
- 灵活、适应性强且功能强大
- 19级拟人自由度、协同设计、单电机
- 可脱位、自我修复的手指关节
- 抓力62牛(夹点配置)
- 标称有效载荷1.7千克(夹点配置)
- 从手掌完全张开到握紧拳头,仅需1.1秒
- USB和RS485接口
- ROS兼容
- 重量:500克
- 反馈:电机位置和电机电流
使用方法
qb SoftHand Research通过两种配置以机械方式调整抓握:
- 夹持抓取
- 强力抓取
使用提供的连接法兰安装夹爪,并按照手册规定连接电缆。
将USB闪存盘插入机器人的示教器中,以安装URCaps插件。
-
技术资料
兼容性:
UR3, UR5, UR10
UR3e, UR5e, UR10e
CB3.1
软件版本要求:
PolyScope 3.4或更高版本。
请联系support@qbrobotics.com询问历史版本的兼容性。
配套使用要求:
None
认证与标准:
进行中
尺寸:
216x191x56毫米(开放式配置)
套件内容:
- N.1 qb SoftHand Research 12/24伏(变形夹持或动力运动学);
- N.1 ISO 9409-1-50-4-M6法兰适配器;
- N.1 qb假人;
- N.1 主电缆,5米;
- N.1 电力电缆;
- N.1 USB线,0.5米;
- N.1 USB pendrive;
- N.4 M6x10螺丝;
- N.5 M4x12螺丝。
许可类型:
一次性购买
免费URCap软件
免费更新URCap


本产品适用于

UR3 机器人
有效载荷 3 kg
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg