HAND-E
HAND-E
Hand-E夹爪可让您更快地开始生产。集成后,即插即用,可以快速适应各种形状和大小的部件。适用于以下应用
- 拾取与放置
- 机床上下料
- 机器维保
- 组装
- 实验室分析及测试

安装
开发
功能
-
描述
特性与优势
- 50毫米行程
- 易于编程位置、速度和力量
- 消除转换并降低工装成本
- 内置部件检测功能
- 精确、功能强大
- 密封用于工业环境
使用方法
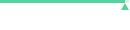
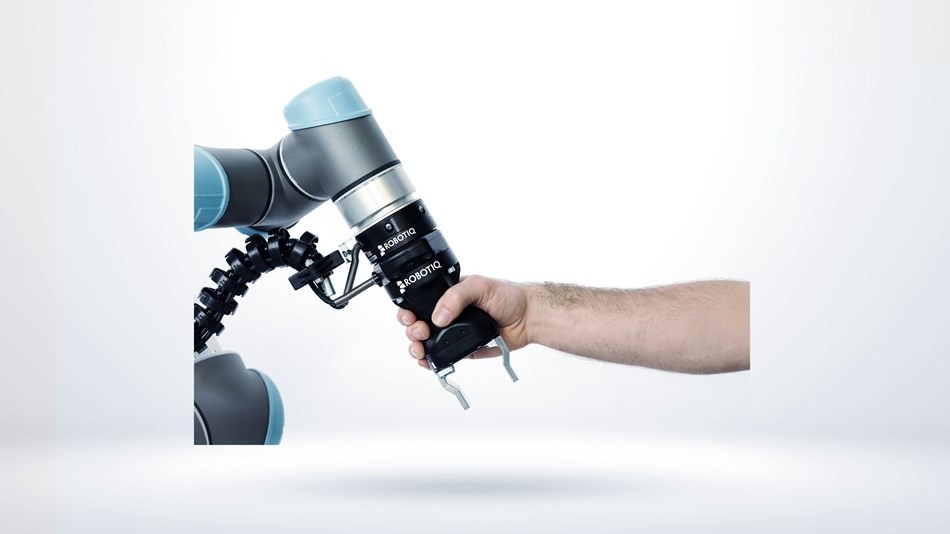
Hand-E夹爪可在所有型号的优傲机器人中支持即插即用。您可以全面掌控夹爪,灵活调整其位置、速度和力度,以便完美地抓住物体。Hand-E能与Robotiq Plug +产品无缝集成。您的机器人可以使用腕式摄像头找到正确的部件,并借助FT 300力控传感器和Hand-E正确插入。通过使用机器人上的多个夹爪,您还可以缩短周期时间。 -
技术资料
包含一个URCap插件:是。兼容性:UR3, UR5, UR10UR3e, UR5e, UR10eCB2, CB3.0, CB3.1软件版本要求:PolyScope 3.5及更高版本需要使用最新的URCap插件。如果使用旧版本,请联系Robotiq支持,获取以前的版本。配套使用要求:无配套要求。通过视觉和力控制启用新应用程序。Hand-E与Robotiq FT 300力控传感器和腕式摄像机无缝集成,简化了过程中的电缆管理。认证与标准:符合机械指令2006/42/EC(CE)的适用基本要求。此外,该产品声明符合以下指令,根据该指令,产品已通过CE认证:2011/65/EU——电气设备中限制使用某些有害物质指令(ROHS)已应用以下标准:NF EN ISO 14539 2000操作工业机器人——带抓握式夹爪的物体搬运——词汇和特性表征NF EN ISO 12100 2012机械安全设计的一般原则——风险评估和风险降低CEI 60204-1 Ed5.1 2009机械安全——机械电气设备——第一部分:一般要求NF EN ISO 9409-1 2004操作工业机器人——机械接口第一部分:板尺寸:外壳直径:75毫米高度:含联轴器110毫米(不含指尖)套件内容:用于UR的Hand-E夹爪套件包括:Hand-E夹爪指尖启动套件安装在UR机器人上的联轴器电源和含USB适配器的通信线螺丝套件安装URCap*的USB棒*可以从support.robotiq.com下载URCap许可类型:一次性购买免费URCap软件免费更新URCap


本产品适用于

UR3 机器人
有效载荷 3 kg
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg


