RG2 夹爪
RG2 夹爪
RG2 夹爪能够完美适配 UR 机器人,操作灵活、使用简单。该款夹爪灵活性高、易于编程,能够缩短设备的投资回报时间。RG2 夹爪无需布置外部电缆,因此,不必担心机器人移动会导致电缆移位。
用户可通过优傲机器人用户界面直接控制 RG2 夹爪的移动和夹持力。夹爪和机器人控制都存储在同一程序内。RG2 能够测量物体的宽度并检测是否抓到了物体,然后将所有反馈信号传送给机器人,让机器人根据输入信号来行动。
必要时,还可以再连接一个 RG2 夹爪,即机器人同时控制两个夹爪——同样无需任何外部电缆。
适用于以下应用
- 包装及堆垛
- 拾取与放置
- 机床上下料
- 机器维保
- 组装
- 实验室分析及测试

安装
开发
功能
-
描述
特性与优势
- 即插即用
- 夹持力可调
- 可控制两个夹爪
- 故障安全操作
- 持续施力
- 编程简单
- 集成式控制板
- 安装简单快捷
- 适用于所有 UR 机器人
规格
- 有效载荷:2 千克
- 夹持力:3-40 牛顿
- 冲程:共 110 毫米
- 重量:650 克
- 夹持力及工件宽度检测
-
技术资料
是否含 URCap 插件:是的。兼容性:UR3、UR5、UR10UR3e、UR5e、UR10eCB2、CB3.0、CB3.1所要求软件版本:PolyScope 1.2 或更高版本。配套使用要求:无认证与标准:2014/30/EU — 电磁兼容指令 (EMC)2011/65/EU — 限制某些有害物质的指令 (RoHS)尺寸:200x75x35 毫米套件内容:全套:- RG2- 支架- USB- 螺丝许可类型:一次性购买EMC / 噪声水平:2014/30/EU — 电磁兼容指令 (EMC)




本产品适用于

UR3 机器人
有效载荷 3 kg
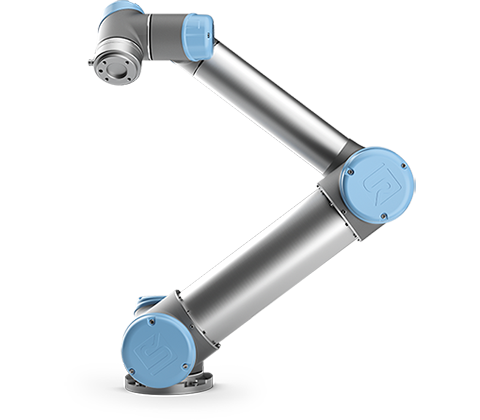
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg