GRIPKIT-CR
GRIPKIT-CR
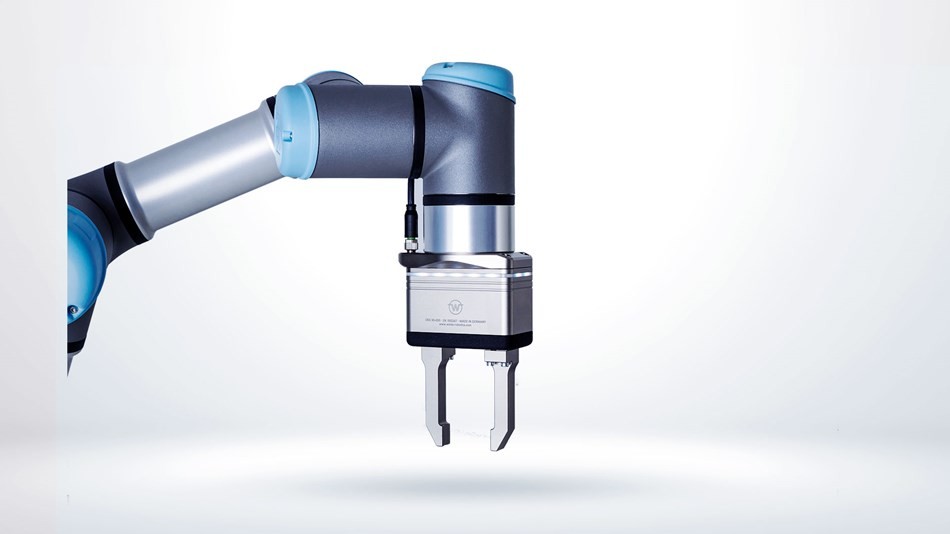
GRIPKIT-CR1 是专为优傲机器人打造的交钥匙协作夹持解决方案,基于 Weiss Robotics 的高性能系列夹持模块 CRG 30。GRIPKIT 功能丰富,能够让您在几分钟内实现处理和操控应用。可提供伺服电动或智能气动版本,完全兼容所有优傲机器人。伺服电动 GRIPKIT-CR 无需压缩空气,能够提供夹持力和位置都受控的协作型处理解决方案。如果您需要简单有力的气动夹爪,或者您用不着协作型夹爪,那么,您可以看下我们的GRIPKIT-P(智能气动)和 GRIPKIT-E 系列(伺服电动)。
适用于以下应用
- 包装及堆垛
- 拾取与放置
- 组装

安装
开发
功能
-
描述
特性与优势
GRIPKIT-CR 系列采用 Weiss Robotics 超紧凑伺服电动夹持模块 CRG 30 打造而成。CRG 30 边缘圆润,夹持力安全,是适用于协作式机器人的灵活工具,符合 DGUV 对协作式机器人系统的推荐规范以及 ISO/TS 15066 标准的要求。这大大简化了协作式机器人应用程序的风险评估操作。GRIPKIT-CR1 采用统一尺寸,夹持力范围为 7.5-30 牛顿,是协作式机器人的明智之选。GRIPKIT-CR1 能够可靠地处理形状类似的不同零件,通过集成的力控机构,其甚至能够夹持脆弱、易碎的柔性件。技术可靠GRIPKIT-CR 平动夹爪采用了大尺寸、免维护线性导轨以及高扭矩无刷伺服电机。GRIPKIT-CR 精度高、结构坚固、可保证 2000 万个夹持周期,能够无障碍进行全天候应用。集成式控制器GRIPKIT-CR 系列夹爪采用高性能运动处理器,为夹持过程引入前沿技术。控制算法先进,能够实现高度动态和精确的力/位置控制,确保在任何情况下都能达到卓越的夹持效果。零件检测与监控夹爪可自动检测是否抓到零件,并能够在整个处理过程中监控夹持操作,确保处理过程的可靠性,无需任何外部传感器。力控夹持力支持调整,以便达到完美的处理效果。在处理过程中,基于高性能模型的力控算法会持续控制夹持力,即使是敏感工件也能安全处理。无缝集成多达 8 个夹爪通过随附的便捷 URCaps 插件,GRIPKIT-CR 能够无缝集成入 Polyscope 软件。GRIPKIT-CR 可同时支持多达 8 个夹爪连接至同一机器人,便于您操作大型项目。您甚至还可以在同一应用中,混合使用伺服电动夹爪、气动夹爪和协作型夹爪。交钥匙解决方案GRIPKIT-CR 系列功能丰富,能够让您在几分钟内实现拾取与放置应用。其包括夹持模块、连接机器人控制器的电气接口转换器,用于将夹爪安装在机械臂上的安装板,以及所有必要的电缆和螺丝。只需打开包装,将其安装在机器人上,装上 URCaps 插件,便可以开始夹持操作!使用方法
只需将夹爪安装到机械臂上,利用提供的电缆和接口转换器连接机器人的 USB 端口。将提供的 USB 闪存盘插到机器人的示教器上,安装 URCaps 插件。现在,您可以从 USB 闪存盘中选择一个示例,也可以自己创建新程序。所有这些步骤都在 GRIPKIT 操作手册中有详细的介绍。URCAPS 插件
无缝集成GRIPKIT 提供的 URCaps 插件可无缝集成到 UR 控制器运行的 Polyscope 软件环境中。无脚本代码由于其为所连接夹爪提供了夹持、释放和状态控制的图形化命令,因此,无需专门的脚本编程知识。配置简单插件配置简单,每个夹爪可控制多达四个不同工件。您可以为工具加上有意义的名称,以在后续编程和操作能够方便地识别。工件示教GRIPKIT 具有独特的示教功能,您可以直观地示教工件的夹持参数。这就像手动把夹爪手指移动到工件上一样简单。提升灵活性通过 GRIPKIT,同一机器人控制器可同时操作多达 8 个夹爪。而且,所有 GRIPKIT 产品的插件都是一样的,您可以混合多种类型的气动和电动夹爪。此外,其还支持离线编程,无需物理连接夹爪。 -
技术资料
是否含 URCap 插件:是兼容性:UR3、UR5UR3e、UR5eCB3.1所要求软件版本:3.4.或更高版本认证与标准:2014/30/EU — 电磁兼容指令 (EMC)2011/65/EU — 限制某些有害物质的指令 (RoHS)ISO 12100-1/2 — 机械安全、基本概念和设计通则)ISO / TS 15066 — 机器人与机器人装备 -- 协作机器人尺寸:GRIPKIT-CR1:80 x 44 x 55 毫米(仅夹爪)套件内容:CRG 30-050 夹爪模块DC-IOLINK 接口转换器安装板,用于将夹爪安装在 UR 机器人上数据电缆USB 闪存盘,内含 URCaps 插件、示例、文档印刷版操作手册


本产品适用于

UR3 机器人
有效载荷 3 kg
UR5 机器人
有效载荷 5 kg