KIT-UR-V
KIT-UR-V
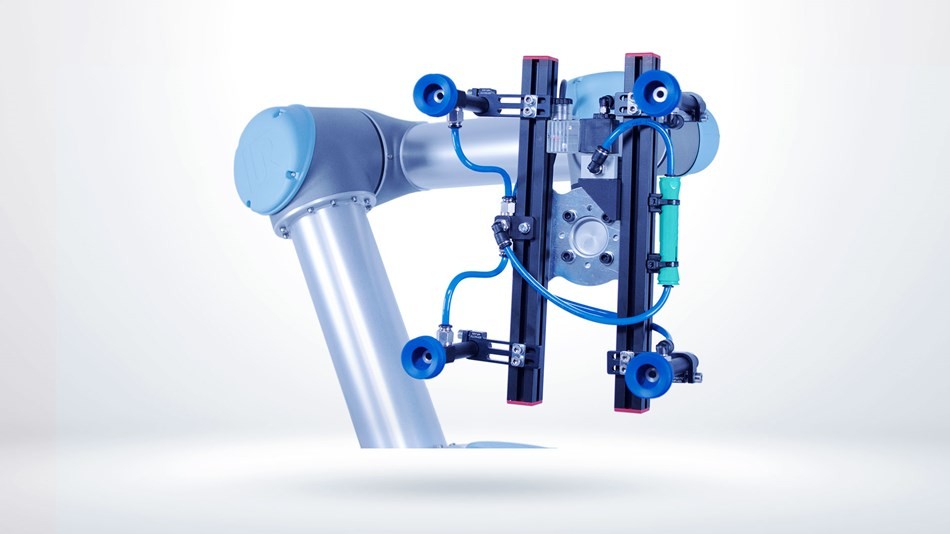
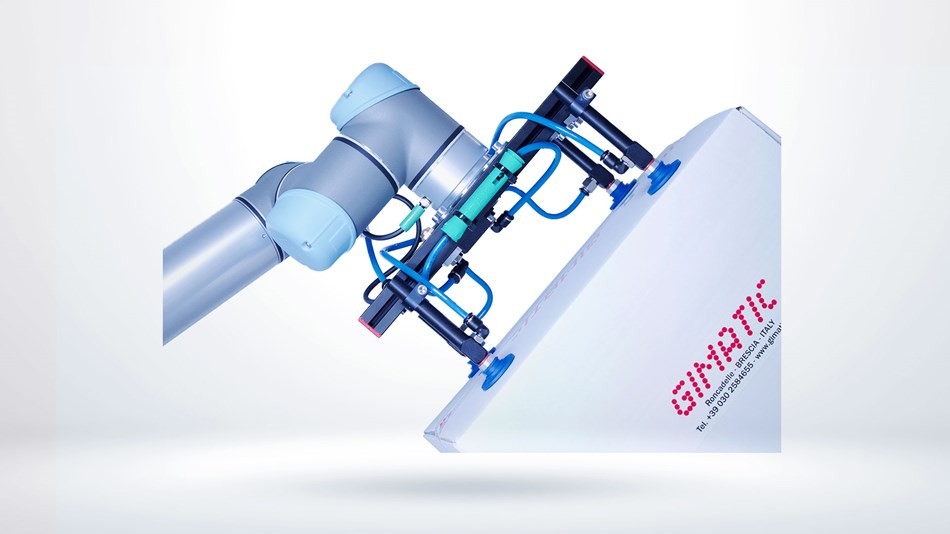
用于真空拾取与放置操作的臂端工具 (EOAT)。该系统可安装于 UR 3、UR 5 或 UR 10 协作式机器人,所附气动执行机构和组件可直接连接机器人手腕和气动电源。
适用于以下应用
- 包装及堆垛
- 拾取与放置
- 组装

安装
开发
功能
-
描述
特性与优势
- 专门设计用于 UR 3、UR 5 和 UR 10
- 机械臂上无电缆:直接连接至机器人配备的 M8 插头连接器
易于安装,无需任何配置(即插即用解决方案) - 嵌入式真空发生器、阀门及电磁阀
使用方法
将系统和随附的机械法兰安装在机器人手腕上,然后将主进气阀连接至气动电源。该系统可以直接连接到机器人手腕上的M8插头连接器(无需沿机械臂布置电缆),通过 UR 机器人工具接口的数字输出操作。 -
技术资料
兼容性UR3、UR5、UR10UR3e、UR5e、UR10e无特殊软件要求。认证与标准:2006/42/CE 指令UNI EN ISO 12100 第 1 部分和第 2 部分尺寸:306 x 228 x 135 [毫米]包装内容真空夹持系统及真空杯、气动阀、电磁阀和真空发生器附加说明GIMATIC 产品订购编号 KIT-UR-V。随附标准真空杯(HNBR)。欲了解其他真空杯,请咨询 GIMATIC。


本产品适用于

UR3 机器人
有效载荷 3 kg
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg