PHD PNEU-CONNECT
PHD PNEU-CONNECT
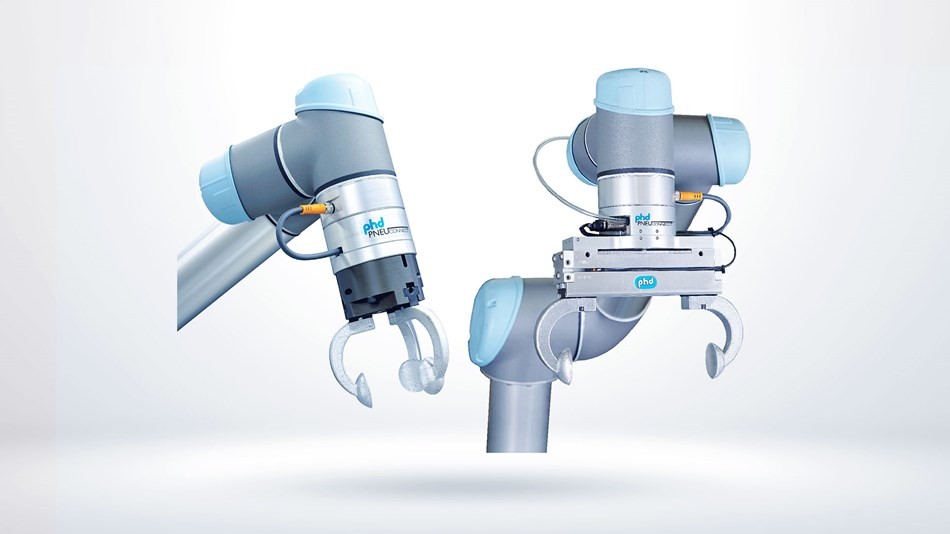
PHD Pneu-Connect™是一种经济高效的气动末端执行器系统,可为使用标准PHD气动夹爪的优傲机器人提供无缝集成。
适用于以下应用
- 包装及堆垛
- 拾取与放置
- 机床上下料
- 机器维保
- 组装
- 实验室分析及测试

安装
开发
功能
-
描述
特性与优势
- 无缝、经济高效的末端执行器集成
- 便于使用
- 集成MAC®阀门和控制板
- 支持应用特定工装的通用钳口
使用方法
Pneu-Connect套件包括夹爪、夹爪安装板和直接连接到协作机器人臂的袖带。使用袖带可轻松将PHD气动夹爪连接到优傲机器人上,并且内置MAC方向控制阀只需一根气管即可打开和关闭夹爪。
该系统附带“UR CAP”软件——一种专用于UR机器人的应用程序。CAP在UR控制软件内部运行,并提供图形界面,方便编程和设置气动夹爪并通过优傲示教器进行集成。
-
技术资料
包含一个URCap插件:
是。
兼容性:
UR3, UR5, UR10
UR3e, UR5e, UR10e
CB2, CB3.0, CB3.1
软件版本要求:
CB 3.4 和 CB 3.5
配套使用要求:
压缩空气
认证与标准:
N/A
尺寸:
可以使用各种尺寸的夹爪。
套件内容:
夹爪,
Pneu-Connect安装板和带有集成阀门的袖带,
带UR Cap的USB,
紧固件和开关(如适用)。
许可类型:
一次性购买


本产品适用于

UR3 机器人
有效载荷 3 kg
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg