PR10 协作式真空夹爪
PR10 协作式真空夹爪
PR10是真正的协作式真空夹爪。它具有可调节的夹臂和可更换的吸盘,十分灵活。夹爪因此能够胜任许多不同尺寸和形状的夹持任务。PR10完美适用于所有UR机器人。适用于以下应用
- 包装及堆垛
- 拾取与放置
- 机床上下料
- 机器维保

安装
开发
功能
-
描述
特性与优势
- 有效载荷 10 千克。
- 双夹持功能
- 无需外部空气供应或布线
- 可调节的夹持臂经调节可适用于各种工件。
- 内置真空传感器,夹持力可调节、稳定可靠。
- 吸盘数量可配置,使用G1/8插座能配置1至16个吸盘。
- 30分钟内即可完成安装、编程并开始制造。
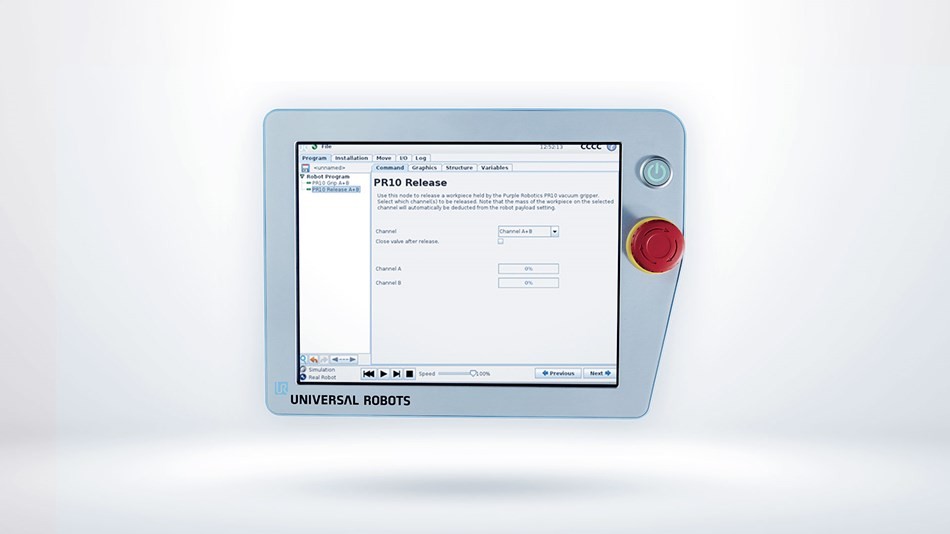
使用方法
PR10有一个内置的电动真空泵,可通过机器人刀具连接装置中内置的URCap直接控制。
PR10利用其内置的真空传感器提供实时反馈,以确保夹持力稳定,并降低功耗。
-
技术资料
兼容性:
UR3, UR5, UR10
UR3e, UR5e, UR10e
CB2, CB3.0, CB3.1
所要求软件版本:
支持所有PolyScope版本——某些功能仅适用于PolyScope 3.3及以上版本。
配套使用要求:
无
认证与标准:
- 这份清单仅为概述性介绍;有关详细信息,请参阅PR10手册
- ISO 12100,
- ISO 10218-2,
- ANSI/RIA R15.06,
- CAN/CSA-Z434,
- ISO/TS 15066,
- RIA TR R15.606,
- ISO/TR 20218-1,
- ISO 9409-1(50-4-M6型),
- IEC 60529 (IP54),
- IEC 61131-2,
- IEC 61076-2-104(8-way,A编码,金触点),
- ISO 13732-1,
- IEC 61000-6 2和4子部分,
- IEC 60068-2 1、2、27和64子部分,
- IEC 60664-2 1和5子部分,
- UL 1740
尺寸:
折叠:145x145x122毫米(5.7x5.7x4.8英寸)
展开:385x385x122毫米(15.2x15.2x4.8英寸)
包装内容:
- 1x Purple Robotics PR10
- 1x Purple Robotics快速换刀装置
- 1x 200毫米 M8电缆
- 16x 1½斜面Ø30毫米硅胶杯(预装)
- 16x G1/8吸盘接头(预装)
- 4x 1½斜面Ø40毫米硅胶杯
- 4x 1½斜面Ø15毫米硅胶杯
- 16x G1/8盲孔螺丝
- 4x M6x8毫米T30螺钉(安装至机器人上)
- 1x 精密销(旋转锁)
- 1x T30内六角扳手
- 1x 5毫米内六角扳手(接头)
- 1x 3毫米内六角扳手(盲孔)
- 1x 用户手册(英文)
- 1X U盘(URCap+手册)
许可类型:
一次性购买





本产品适用于

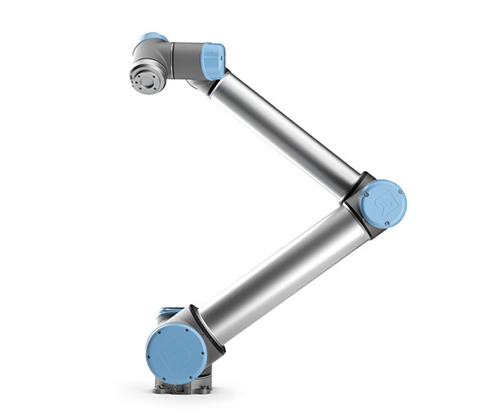
UR3 机器人
有效载荷 3 kg
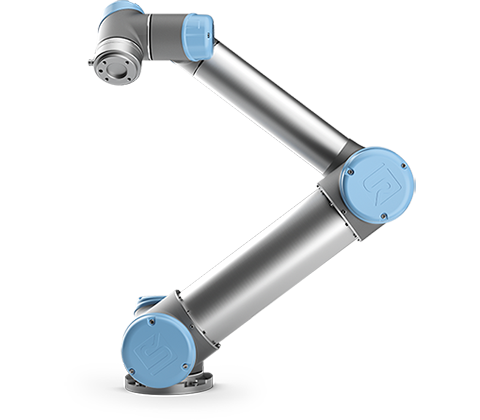
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg