ROBOTIQ 2F-140
ROBOTIQ 2F-140
2F-140和2F-85是全球最畅销的协作机器人机械手。集成后,即插即用,可以快速适应各种形状和大小的部件。
适用于以下应用
- 拾取与放置
- 机器维保
- 组装
- 质量检验

安装
开发
功能
-
描述
特性与优势
- 2F-140为即插即用型应用,可集成至各型号的优傲机器人。
- 您可以完全控制机械手,调整其位置、速度和力度,以便完美地夹持物体。
- 2F-140兼容e系列,可直接连接到UR e系列机器人的腕部。
- 其电气连接保护器提高了安全性,优化了2F-140的协作性能。
- 2F-140坚固耐用,硬件经工厂验证,适用于工业环境。
- 它能与Robotiq即插即用产品无缝集成。
- 您的机器人可以使用腕式摄像头找到正确的零件,并使用FT 300 Force将其正确插入
- 扭矩传感器和2F-140。
- 通过在一个机器人上使用多个机械手,您还可以缩短周期时间。
使用方法
2F-140的专利手指设计可实现内外部平行夹持,以及独特的握持模型。
2F-140还具有独特的嵌入式零件检测和开模反馈。
- 2F-140为即插即用型应用,可集成至各型号的优傲机器人。
-
技术资料
是否含URCap插件:
是
兼容性:
UR3, UR5, UR10
UR3e, UR5e, UR10e
CB2,CB3.0, CB3.1
所需软件版本:
Polyscope 3.4及以上版本需要使用最新的URCap插件。
如果使用旧版本,请访问support.robotiq.com并查阅档案。您也可以联系Robotiq的支持部门,以获取早期版本。
配套使用要求:
无认证与标准:
符合机械指令2006/42/EC(CE)的适用基本要求。
此外,该产品声明符合以下指令,根据该指令,产品已通过CE认证:
2014/30/EU——电磁兼容指令(CE-EMC)
2011/65/EU——电气设备中限制使用某些有害物质指令(ROHS)
已应用以下标准:
NF EN ISO 14539 2000操纵工业机器人 - 使用抓握式夹具进行物体搬运 - 词汇和特征表示
NF EN ISO 12100 2012机械安全 - 设计的一般原则 - 风险评估和风险降低
CEI 60204-1 Ed5.1 2009机械安全——机械电气设备——第一部分:一般要求
尺寸:
75 mm腕部直径
2F-140具有140mm的开模和行程。
套件内容:
2F-140
安装在UR机器人上的联轴器
电源和含USB适配器的通信电缆
螺丝套件
安装URCap*的USB棒
*可以从support.robotiq.com下载URCap
许可类型:
一次性购买
免费URCap软件
免费更新URCap
电磁兼容性/噪声等级:
该产品声明符合电磁兼容性指令(EMC)2014/30/EU。
行程(可编程)
140 mm
握力(可编程)
10至125 N
适形夹持有效载荷
2.5 kg
摩擦夹持有效载荷
2.5 kg
机械手质量
1 kg
位置分辨率(指尖)
0.6 mm
关闭速度(可编程)
30-250 mm/s
通信协议
Modbus RTU(RS-485)
通信协议选项(含外部控制器)
Modbus TCP、EtherNet/IP、PROFINET、DeviceNet、CANopen、EtherCAT





本产品适用于

UR3 机器人
有效载荷 3 kg
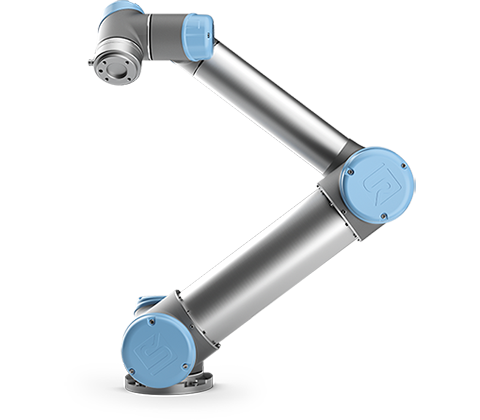
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg