SRT 柔性夹爪
SRT 柔性夹爪
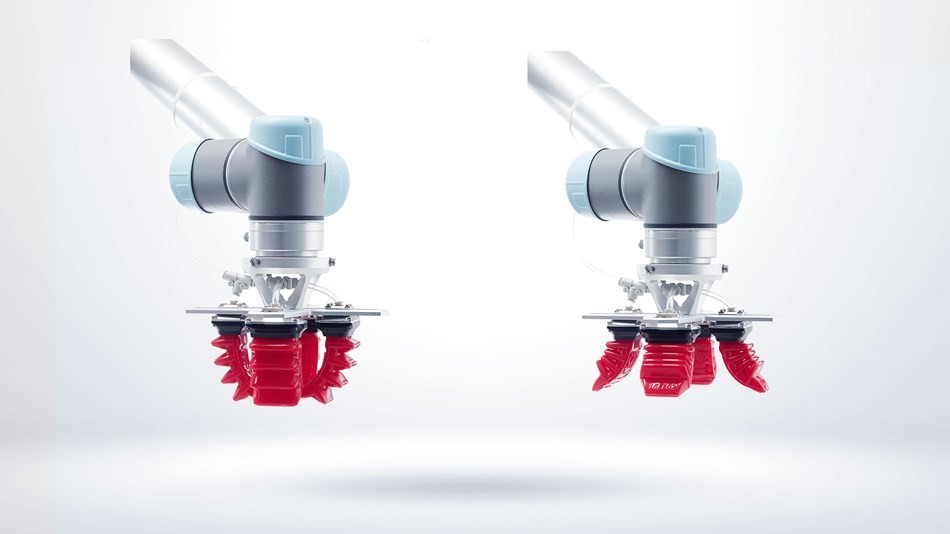
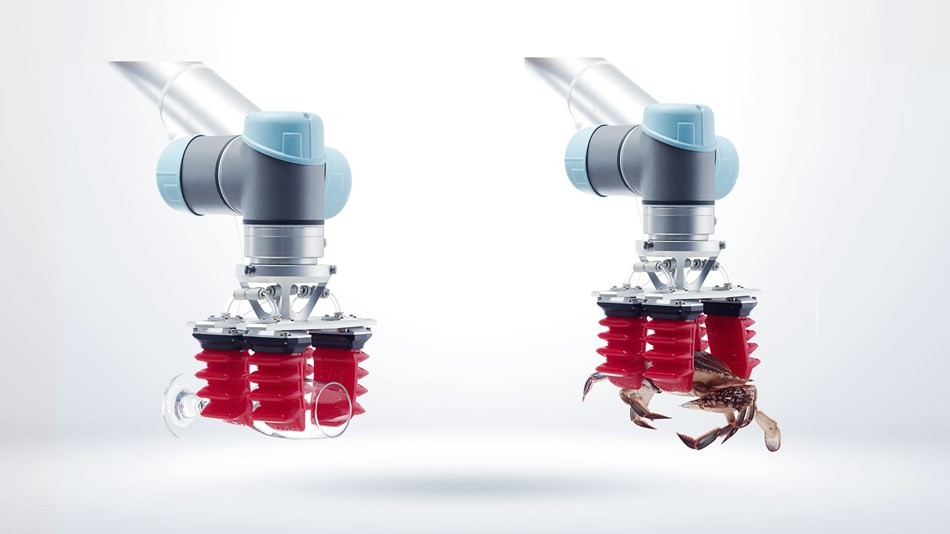
其主要部件由柔性材料制备,模拟人手的抓取动作,同一爪手即可抓取不同尺寸、形状和重量的物体。不同于传统爪手的刚性结构,柔性夹爪具有柔软的气动“手指”,能够自适应地包覆住目标物体,无需根据物体精确的尺寸、形状进行预先调整;
摆脱了传统生产线要求生产对象尺寸均等的束缚。夹爪手指部分由柔性材质构成,抓持动作轻柔,尤其适合抓取易损伤或软质不定形物体。
适用于以下应用
- 包装及堆垛
- 拾取与放置

安装
开发
功能
-
描述
特性与优势
- 使用一般法兰,安装和替换方便快捷
- 组装简单,依靠正负压控制夹爪实现抓取动作
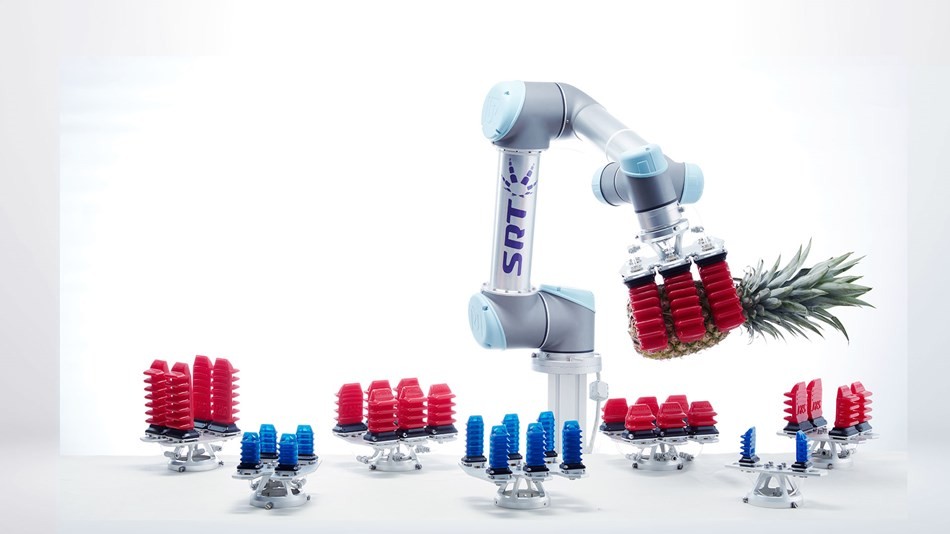
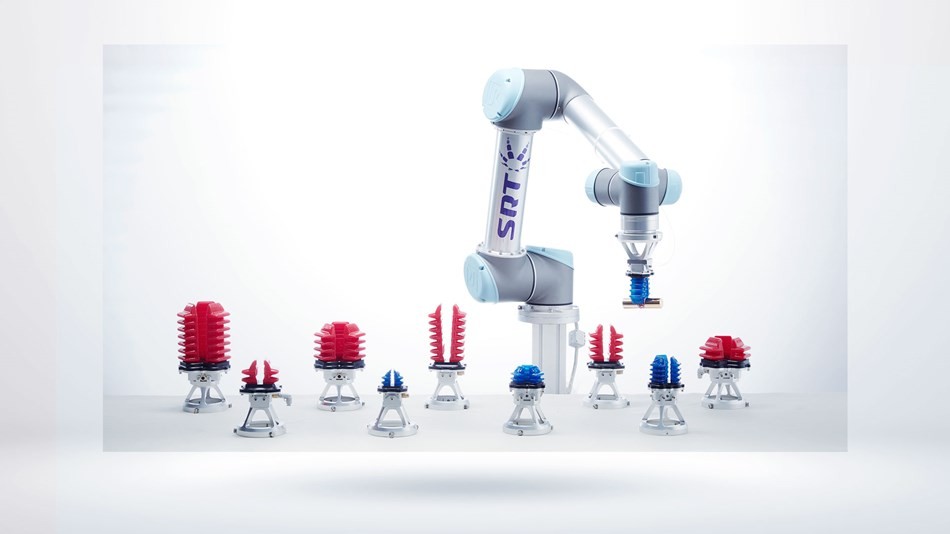
- 多种选择类型,可用于不同抓取任务
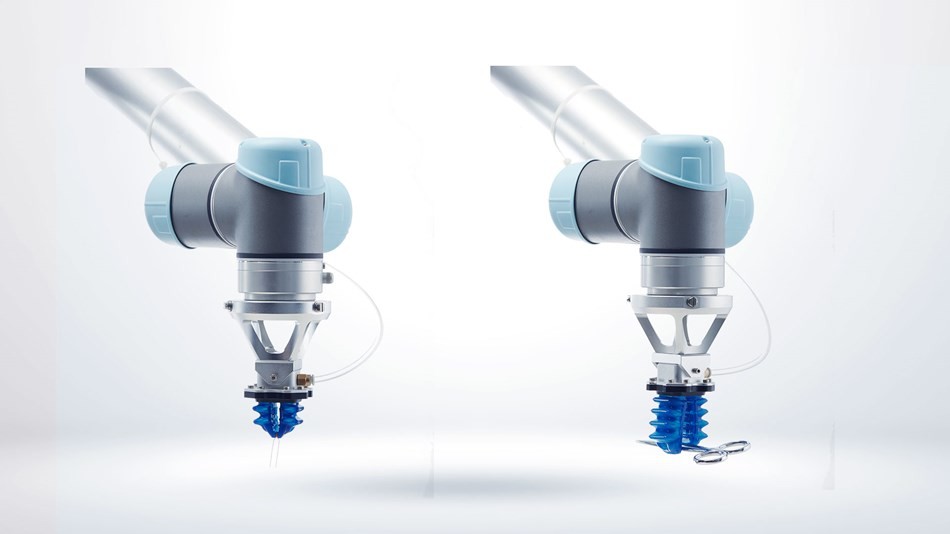
- 紧凑型夹爪,专注于较小的异形工件
- 同一抓手可抓取一定范围内不同尺寸和重量的物体
- 引入仿生机制,抓取运动更可靠
- 确保夹持物品完好无损以及操作人员的安全
- 通过美国食品药品管理局系统认证,安全卫生
- 柔性夹爪位置可校准
使用方法?
安装柔性夹爪 URCAP- 在安装界面设置初始抓取压力(正压和负压)
- 按照界面上的说明连接夹爪控制器,并激活控制器
- 控制器 IP 地址:192.168.1.7
- UR 机器人网络地址:192.168.1.X(X=2~254,X≠7)
设置工作模式- 夹持压力设置:数值位于 5 至 95 之间
- 释放压力设置:数值位于 -75 至 -5 之间
- 动作设置:夹持/释放/泄压(压力值为 0)
-
技术资料
所要求软件版本:PloyScope 1.3 或更高版本配套使用要求:空气压缩机尺寸:520*410*200 毫米套件内容:全套:SRT 柔性夹爪、支架、U 盘、线缆、螺丝SRT 控制器、法兰、连接件、导管接头气管(Φ6 和 Φ8)许可类型:一次性购买


本产品适用于

UR3 机器人
有效载荷 3 kg
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg