ROBODK 仿真及离线编程
ROBODK 仿真及离线编程
RoboDK 仿真软件可以让您充分利用 UR 机器人。只需点击几下,便可在电脑上离线仿真 UR 机器人、以及将 URP 和 SCRIPT 程序在机器人上。通过 RoboDK 仿真和离线编程工具,您可以在生产环境外对机器人进行编程,避免因车间编程导致的生产停工时间。
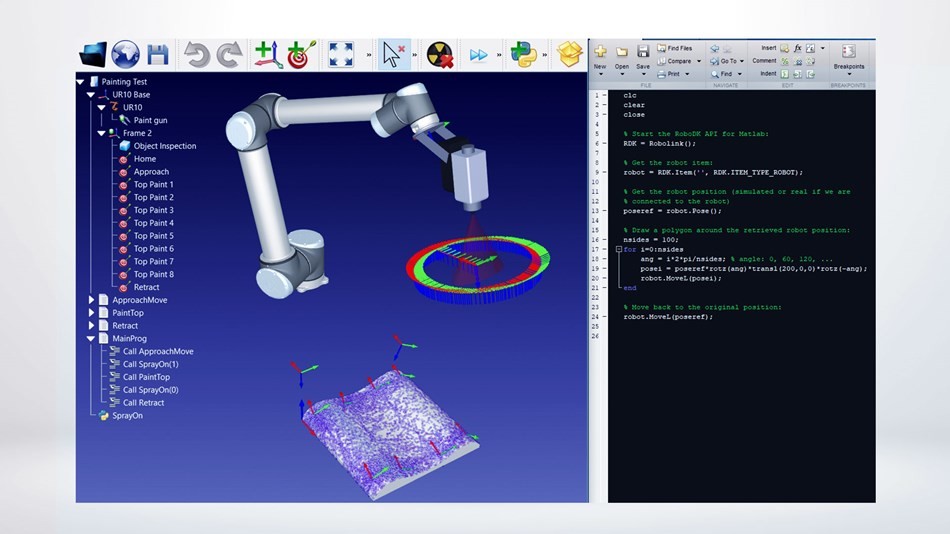
系统配备直观的 RoboDK 图形界面,无需编程技能即可操作。只需在计算机上操作几步,便可轻松编程任何 UR 机器人。点击以下链接,查看如何离线对机器人进行喷漆或检验应用程序编程,只需几分钟即可完成:
https://robodk.com/doc/en/Getting-Started.html
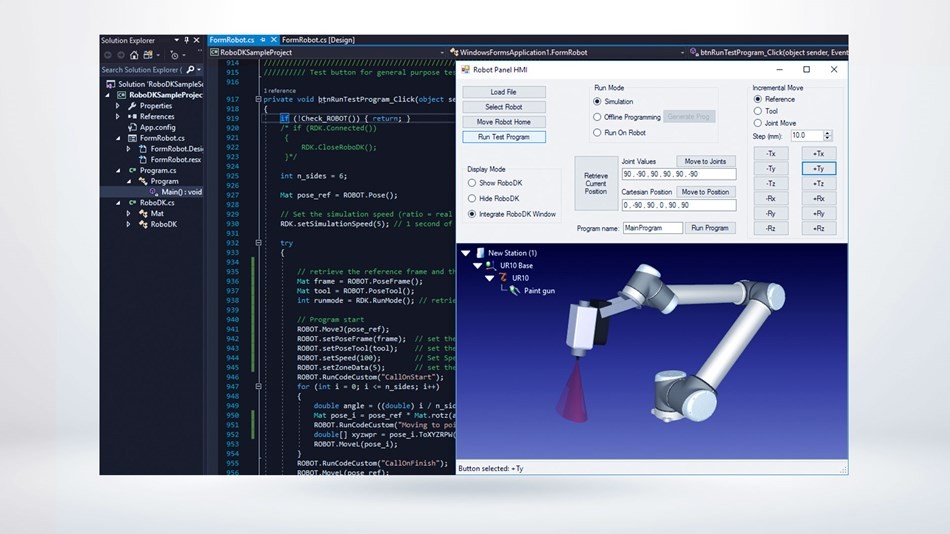
更高级的用户还可以使用 RoboDK API 对机器人进行编程。RoboDK API 支持用户选择 UR 机器人编程语言,包括 Python、c#、Visual Basic、c++ 和 Matlab。此外,该软件还能够简化重复性任务自动化,以及将 3D 仿真环境集成入目标项目的操作:
https://robodk.com/doc/en/RoboDK-API.html
适用于以下应用
- 包装及堆垛
- 拾取与放置
- 机床上下料
- 机器维保
- 螺丝固定
- 组装
- 实验室分析及测试
- 抛光
- 点胶、焊接、分配
- 质量检验
- 注塑成型

安装
开发
功能
-
描述
特性与优势
- 直观的图形用户界面——无需编码即可进行机器人编程。
- 拖放功能——几分钟即可设置好工作单元(工具、环境)。
- 库内容丰富——为您的项目提供广泛的工具、执行器和传感器选择。
- 支持 3D 模型——支持对象导入,以及使用 STL、STEP 和 IGES 等 3D 文件创建新工具。
- 外部轴——集成外部轴,扩展机器人的可达性。
- 外部轴——集成外部轴,扩展机器人的可达性。
- 即时运行程序——只需点击几下,便可直接执行计算机上的程序。
- 实时监控——可在计算机屏幕上查看机器人状态。
- 机器人 CAM 插件——便于将 5 轴电脑数控工具路径转化为机器人程序,像操作 5 轴电脑数控机一样操作计算机。
- 自动路径求解——避免潜在的机器人误差,包括奇点、关节限位、可达极限和碰撞。
- 快速碰撞检测——方便定义希望规避的对象交互。
- 高级功能——支持在电脑上使用个人偏好的编程语言对机器人进行编程,RoboDK API 支持的编程语言包括 Python、c#、Visual Basic、c++ 和 Matlab。
- 模拟 2D 视觉相机——可在模拟环境下测试图像识别算法。
- 多机器人仿真——可对多个机器人进行同步和编程操作,实现同时移动。
- 便于自定义后置处理器——集成特定传感器或执行器,如夹爪、力控系统、图像处理系统等。
使用方法?
下载 RoboDK,几分钟便可完成机器人的模拟和编程:
- 下载并安装 RoboDK:
- https://robodk.com/download
- 创建模拟。Create a simulation.
- https://robodk.com/doc/en/Getting-Started.html
- 对机器人进行编程。
- 只需点击几下鼠标,就可以创建 URP、SCRIPT 格式文件或直接运行电脑上的程序
- https://robodk.com/doc/en/Robots-Universal-Robots.html
下载软件为 30 天试用版本,包含了所有仿真和离线编程功能。
可在线购买许可证:
https://robodk.com/pricing
- 直观的图形用户界面——无需编码即可进行机器人编程。
-
技术资料
是否含 URCap 插件:不含,会生成 URP 和 SCRIPT 文件。后置处理器可连接至第三方库。兼容性:UR3、UR5、UR10CB2、CB3.0、CB3.1包装内容?电子文档,电子许可证密钥,USB 软件狗许可证选件(需额外支付 150 美元)许可类型:一次性购买。可选购维护更新服务。每台电脑一份许可证。

本产品适用于

UR3 机器人
有效载荷 3 kg
UR5 机器人
有效载荷 5 kg
UR10 机器人
有效载荷 10 kg


